Bicycles
By Tyler Housel, Contributing Editor | TLT Lubrication Fundamentals December 2025
Concepts including torque and force, gravity, friction, balance and others apply to riding a bicycle.

This is my last TLT Lubrication Fundamentals article and it’s time to hand the column over to a new writer. As I ride off into the sunset, I thought it was appropriate to focus this month’s article on my preferred mode of transportation: bicycles. This article reviews several concepts covered in earlier 2025 TLT Lubrications Fundamentals articles. Consider this the final exam.
Torque and force conversion
Like many pieces of mechanical equipment, bicycles transform applied force to useful motion through a series of force-to-torque conversions around rotating axles. Recall that torque (τ) is a vector (cross) product of the moment arm radius (r) and force (F) vectors. The bike design is efficient because forces are applied at right angles to the rotating element. This essentially eliminates power loss because the sin of 90°=1 and the magnitude of the torque is the product r and F.
Drive mechanism
A bicycle’s drivetrain has two primary rotation axles linked by a chain. Figure 1 shows the main components of the drive mechanism, and Table 1 gives examples of how force applied at the pedal produces force and speed at the road surface. In the first row, we assume that the rider pushes on the pedal (through the pedal axle) with a constant 200 Newtons of force at a rate of 1 cycle (2π radians) per second (Hz). This produces a torque of 36 Nm on the crank arm. The drive sprocket (or chainring) is attached to the crank through the drive axle, so their torque and rotation rate are the same (shown in red type). The second row shows that the smaller drive sprocket radius steps up the force as the linear speed of the sprocket decreases. The chain transfers this force and linear speed (highlighted in yellow) from the drive to the rear (cassette) sprocket. We use this force to calculate the rear axle torque (shown in blue), which is now transferred to the rear wheel. The final tire force and linear speed are in the fourth row in bold type.
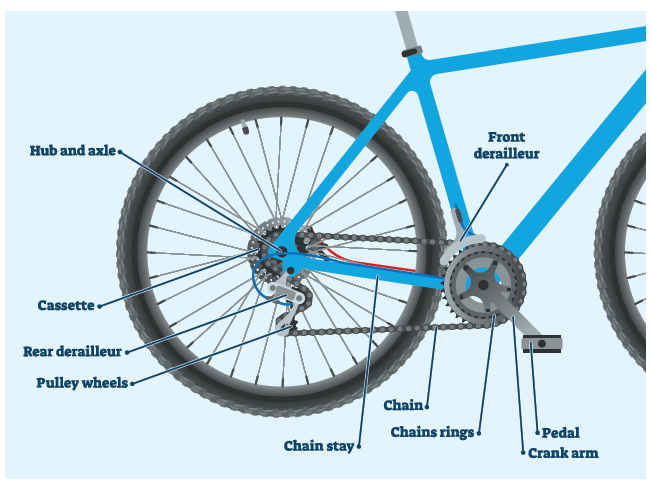
Figure 1. Bicycle drivetrain.2
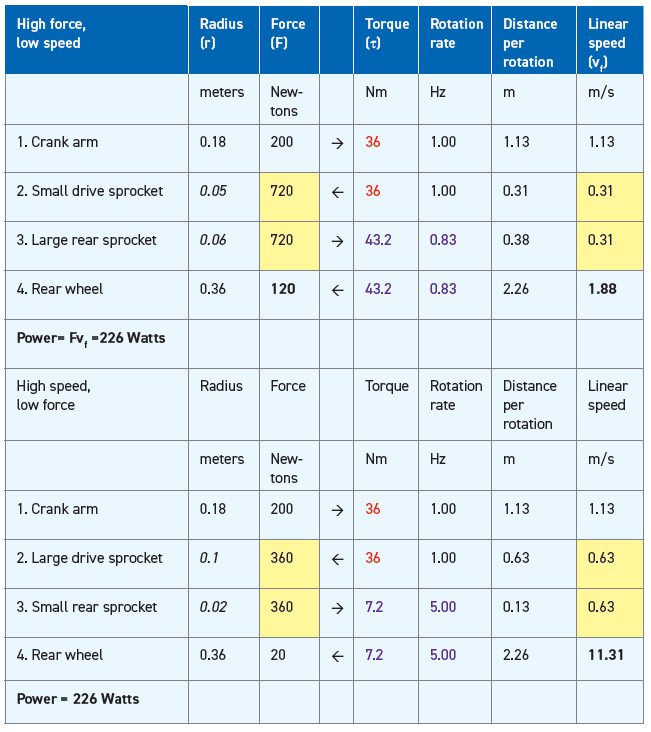
Table 1. How sprocket size converts pedal force to wheel force and speed
Sprockets and speeds
The sizes of the crank arm and rear wheel of a bicycle are fixed, and a starter bike has one sprocket on each drive axle. This means that it has a fixed drive ratio determined by the radii of the crank, wheel and sprockets. In other words, every turn of the crank moves the bicycle the same distance.
Road and racing bikes have multiple sprockets resulting in 18-24 possible sprocket combinations, otherwise known as “speeds.” Front and rear derailleurs allow the chain to shift between sprockets, and the rear derailleur has a tension arm to take up slack in the chain as the gears shift. All this extra equipment increases the cost and complexity of the bike, so there must be a good reason to buy a 24 speed bike.
Looking again at Table 1, the top half shows a sprocket combination with a small drive sprocket (5 cm radius) and a large (6 cm) rear sprocket. The chain force is 720 N and 43 Nm of torque is transferred to the rear axle. This allows the wheel to deliver 120 N of force to the road at a speed of 1.88 m/s. Power is force times speed, and the power is 226 Watts at each element (gearing doesn’t affect power).
When the rider shifts to a large (10 cm) drive sprocket, the chain speed doubles with a corresponding drop in force. This coupled with a small (2 cm) rear sprocket increases the wheel speed significantly to 11 m/s while reducing the available road force to 20 N. In this example, the rider’s pedal action has not changed so the power delivered is still 226 Watts, but the bike speed increases sixfold. This will not surprise the gearheads in STLE because gearsets allow a motor to function at its most efficient speed while allowing the machine to operate over a wide range of speeds. However, the drop in wheel force may not be enough to maintain this speed against the forces acting against the bike’s forward motion.
Balancing the force equation
The August TLT Lubrication Fundamentals1 noted that a moving object reaches a pseudo-inertial state at a velocity that produces resistance forces equal to the drive force. For simplicity, we will ignore internal friction in the drive mechanism because the two most significant resistance forces are gravity and air/wind resistance. Also important to mention that this force balance assumes the bike is already moving at a fixed speed and does not consider the force needed to accelerate from a stop. The following few sections cover forces in the direction of motion that dictate a bike’s forward speed. Later in the article we will discuss how sideways forces maintain vertical stability.
Gravity
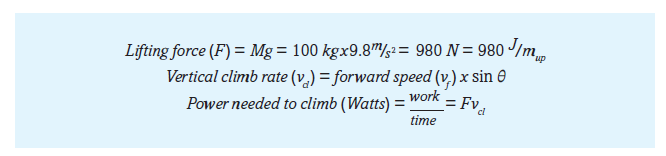
On a flat road, gravity does not affect the force equation, but it is important on uphill and downhill rides. Assuming the rider and bike total 100 kg, it takes 980 Joules of work to climb 1 meter upward (980 J/mup) against gravity. The climb rate (vcl) is determined by the incline angle (θ) and forward speed (vf), which allows us to calculate the power. The rider in Table 1 produces 226 Watts of power, so Table 2 shows that they can go no faster than 2.7 m/s climbing a 5 degree hill or 4.5 m/s to climb a 3 degree incline (highlighted). And yes, if they want to continue pedaling at 1 Hz with 200 N, they must find a gearset that gives the forward speed to match the power (in this example, a 2:1 ratio of sprocket radius gives forward speed of 4.5 m/s). Climbing faster would require the cyclist to pedal with more power.
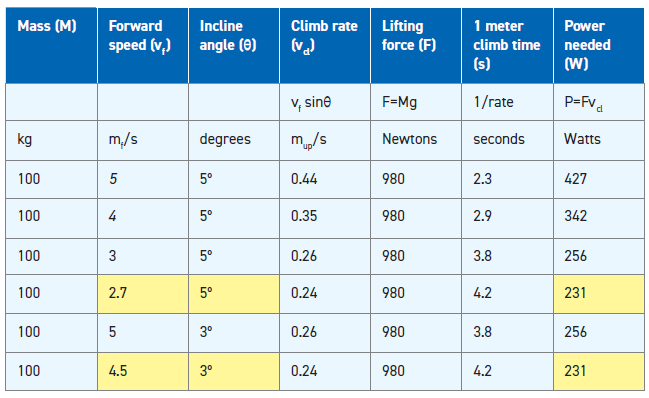 Table 2. Additional power needed to climb a hill
Table 2. Additional power needed to climb a hill
Air resistance
On a long ride, most of the energy is used to fight against air resistance so serious racers learned to ride pelotons before Peloton even existed. Moving objects experience a drag force as they collide with slower moving air molecules. To maintain a steady velocity, the cyclist must counteract the drag force with an equal forward force. This means that momentum is transferred to the air molecules, increasing their velocity in the direction of motion. A group of riders is more efficient because each rider creates an artificial wind that helps the other riders. The Dutch are famous for bike riding and De Ingenieur suggests that riders in the middle of a Peloton only use 5%-10% of the energy compared to solo riders.3
Bike riders are well aware that a tailwind also makes a ride much easier. Just like with an airplane, air resistance is based on airspeed rather than the ground speed, so it helps to have the wind at your back. I was once flying in a 707 (not a Jetstream), and the pilot announced that we were in a strong jet stream, and our ground speed was over 1000 mph. A few minutes later we were ready to land at Idlewild.4
Air resistance increases with a rider’s velocity and is strongly dependent on the specific aerodynamics of the bike and rider. At typical bike speeds, there is a linear relationship between speed and drag; when objects move faster it becomes more complicated because the pressure wave can influence airflow.5 If our rider continues to apply 226 Watts of pedal power, the bike speed will equilibrate when the air resistance and gravity (and internal friction) exactly match the power input.
Friction and lubrication
A well-maintained bike has minimal power losses due to internal friction. The parts of a bicycle can be divided into two groups with diametrically opposed frictional requirements. The first group are rotating elements that transfer torque. These include the wheel axles, drive axle, pedal hub, chain pin/bushing and the steering shaft. All of these parts should freely rotate with minimal friction. A bicycle uses these rotating elements to efficiently couple forces between the rider and the road.
A bicycle also has several linear contacts that transfer force between the rider’s hand and handlebar, foot and pedal, chain and sprocket and tire and road. In these cases, friction must be maximized to avoid slip.
Chain and sprocket
A bike chain is an interesting mechanical device (see Figure 2). Its main purpose is to transfer linear force from the drive to the rear sprocket with the links under tension. Then it changes shape to curve around the sprocket as the pin twists inside the bushing. The sprocket teeth act as huge asperities that catch the rollers so the chain doesn’t slip as it goes around the sprocket. Proper lubrication is tricky because there are more than 100 lubrication points in the annuli between the pin, bushing and roller, but they are difficult to access. Since the chain is exposed to the environment, the lubricant should also protect against rust. However, overlubrication can be a bigger problem. If the chain looks like the one in Figure 3, it will attract dirt and should be wiped dry before riding.
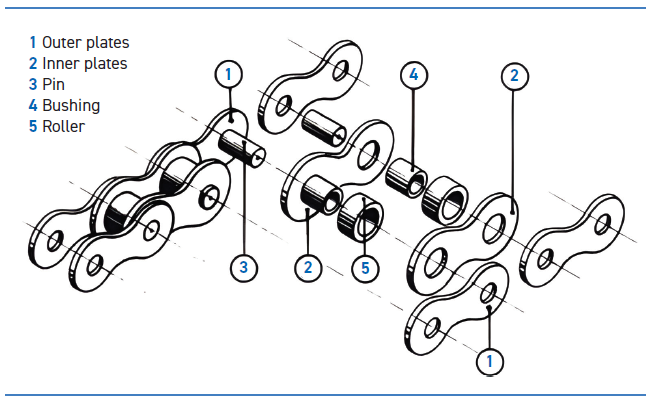
Figure 2. Bicycle chain link.6

Figure 3. Overlubricated bike chain.
Stability factors
Bicycle stability is often attributed to gyroscopic stabilization as the two large wheels act as gyroscopes and the conservation of angular momentum resists any change in direction.7 Although angular momentum is one contributing factor, there are an array of reasons that bikes are much more stable than they initially appear.
Linear momentum leads to inertial forces that also seek to keep the bike moving straight ahead according to Newton’s first law. To change velocity or direction, a new force must push on the object, altering the motion in the direction of the force (second law). The rear wheel and drive mechanism produces forward motion while the front wheel and steering axis manage the sideways motion necessary for balance. The angle between the wheel and forward momentum directions is the steering angle.
Friction between the tire and ground allows the rider to steer, but remember that friction is not a real force. It is a virtual force that can only act in opposition to a real force. When the bike leans to the left (the lean angle), the forward momentum vector shifts to the left of the ground contact point and is now pushing off axis. The tire experiences a real rightward (centrifugal) force against the ground trying to keep the bike moving straight in the direction of the momentum. Friction can oppose this real force and turn the bike to the left.
Balancing forces
A standing object is stable when the center of mass is above its footprint (wheelbase). A car’s wheelbase is the rectangle formed by the four wheels and the car does not tip over because the center of gravity stays vertically above the wheelbase. Our brains immediately recognize that it is impossible to balance a stationary bike on two narrow tires, so how could it possibly remain upright when we ride? Beginners quickly learn a few tricks, and BBC Science Focus uses neuroscience to explain “why you never forget how to ride a bike.”8
A moving car has forward momentum and will continue straight in the absence of sideways forces. Pointing the front wheels a few degrees to the right causes a sideways friction force against the ground and the car starts to turn right. Since the car’s position is now to the right of momentum’s straight forward path, the center of mass shifts to the left (but it is still over the wheelbase). This means the left front tire bears more weight than the right front tire.
Repeating this experiment with a bicycle can lead to a crash. The wheel turn still carries the bike right while forward momentum carries the rider straight ahead. Lacking a left front tire, the center of mass is now to the left of the wheelbase, and the bike will lean to the left and fall if not corrected. Beginning riders quickly learn that the remedy is to steer to the left, so the wheelbase stays under the rider. You can only turn left if you are leaning left, so every left turn starts by steering to the right so the bike will begin to lean left. The first time I drove a car, my mom noticed that I started left turns with a slight right turn and she said, “It’s not like a bicycle.” I never fully understood that until now.
Leaning into a curve
The rider learns to manage the steering and lean angles to stay in balance and studies show that a bike cannot be stabilized if the steering angle is locked.9 On the other hand, a bike can be designed with inherent stability so it can balance without needing a rider. When people ride with no hands, they shift their weight to change the lean angle, and the bike manages the steering angle all by itself. This is possible because most bikes have the front forks bent forward so the front wheel is slightly ahead of the steering axis. This allows the front wheel’s gyroscopic effect to automatically adjust the steering angle when the lean angle changes.10

In a world where internal combustion and electric motors are the most common power sources for transportation, it’s notable that these require very specific fuel sources and we go to great lengths to make sure fuel is available on demand. One advantage of bicycle travel is that the energy comes from whatever we enjoy eating. Then we use that energy to have an enjoyable ride. Besides being fun to ride, bicycles efficiently convert muscle energy to linear motion while providing fresh air, fitness and a sense of community.11 And like time itself, you can change direction but must always move forward. Reverse is not an option.
And one final note: PLEASE SHARE THE ROAD!!!
REFERENCES
1. Housel, T. (2025), “Friction: static and dynamic,” TLT, 81 (8), pp. 20-24. Available at www.stle.org/files/TLTArchives/2025/08_August/Lubrication_Fundamentals.aspx.
2. https://artpictures.club/autumn-2023.html
3. https://deingenieur.nl/artikelen/racing-cyclist-in-peloton-saves-more-energy-than-previously-thought
4. A dollar to anyone who gets the reference without looking it up.
5. www.physicsforums.com/threads/why-does-air-resistance-increase-with-speed.414236/
6. https://bike.bikegremlin.com/wp-content/uploads/2015/12/Rollenketting-eng.gif
7. Housel, T. (2025), “Conservation of angular momentum,” TLT, 81 (7), pp. 24-28. Available at www.stle.org/files/TLTArchives/2025/07_July/Lubrication_Fundamentals.aspx.
8. www.sciencefocus.com/science/why-do-we-never-forget-how-to-ride-a-bike
9. “Linearized dynamics equations for the balance and steer of a bicycle: a benchmark and review,” J. P. Meijaard, Jim M. Papadopoulos, Andy Ruina, A. L. Schwab, June 2007.
10. www.real-world-physics-problems.com/bicycle-physics.html
11. https://bikenorthpenn.org/
Tyler Housel is a technologist for Hnuco Technologies and is based in Lansdale, Pa. You can reach him at tylerhousel@comcast.net.