TLT: What are the current challenges in bearing-simulation technology development?
Stacke: Maybe it is good to start with a definition of bearing simulations. For me, having worked with SKF BEAST (BEAring Simulation Tool) for many years, this means primarily dynamic simulations (i.e., a system is calculated as function of time). But advanced quasi-static calculations also can be considered (
see Figure 1).
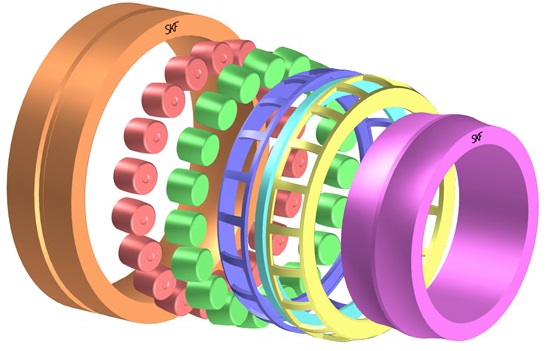 Figure 1. BEAST model of a spherical roller bearing. (Figure courtesy of SKF.)
Figure 1. BEAST model of a spherical roller bearing. (Figure courtesy of SKF.)
I see challenges in several different areas. Rolling bearings are generally mature products. The majority of the bearing types existing today look pretty much the same as they did 100 years ago. The design optimizations that we do are often not visible to the naked eye. Modern bearing calculation tools have been around for about 50 years if I count Jones’ code as the starting point. The level of analysis needed in order to further refine the products is, therefore, constantly increasing.
In the last few decades, analysis capabilities have improved significantly, allowing for simulation of conditions that are often crucial for accurately modeling bearing performance. For instance, influence of structural deformations and thermal variations on the bearings are now routinely included in the analyses.
Where we still need to do more work is in the lubrication area. The influence of the lubricant on the bearing performance is still not fully understood. And there are different aspects of the lubricant. In many applications, churning and drag losses are dominant factors in the total friction loss. The lubricant properties, affecting film building and friction in the raceway contacts, also are hard to find, as they are not given (and probably not known) by the lubricant manufacturers. Finally, the chemical reactions between the lubricant and the bearing materials (e.g., the forming of tribo-layers) have a big influence on the bearing performance and can give premature failure if they don’t work as anticipated.
Transient modeling of the material behavior of the bearing components (e.g., fatigue damage evolution) is yet another example of an area we have barely touched.
Apart from the more technical areas, we also need to make bearing simulations more user friendly. People are so used to smartphones and tablets where user interaction is very intuitive. We need to make bearing simulation software as intuitive to use as possible, both on the input side and on the output side. It should be easy and natural to build models with realistic assumptions and to interpret the results in an engineeringly sound way. So far we still need skilled engineers (and I guess I should be thankful for that) to both build and interpret models, but we should strive for the engineers to spend their efforts on relevant and productive tasks and not on trying to figure out what the program wants them to do.
Also, being part of a mechanical business with immense experience and proud traditions, too much reliance on computer-generated data is sometimes frowned upon. We constantly need to make sure that we have well-validated and reliable models.
The industry need for large-size bearings poses quite a different challenge. Multi-row roller bearings with several meters in diameter and hundreds of rollers per row is an enormous calculation challenge. Especially for bearings of this size and load, the structural deformations cannot be neglected. Slow rotational speed also makes the needed simulation times longer.
TLT: What are the major simulation technology fields for SKF?
Stacke: SKF uses simulation technology at different parts of the organization, from research to application engineering and sales support. The main thrust of the work has to do with ensuring that our customer gets products that are fit for the intended purpose. It can vary from a new wind main shaft bearing design to a Formula 1 gearbox bearing. Every time we are outside of our normal comfort zone, simulations may help us with the answers—or help us to ask the right questions.
TLT: How have these technologies helped SKF?
Stacke: Simulations bring many benefits, especially to an industry as mature as the rolling bearing business. The most obvious low-hanging fruits have been picked years ago, and in order to make progress we need to look deeper and to increase our understanding of how the products work. That is one of the great benefits of simulations.
The combination of simulation with testing is especially powerful. There are so many things going on in a bearing that we cannot measure but can study with simulations. At the same time, the simulations are based on models of reality, not reality itself. The models need to be verified to experiments as far as possible.
A good example of this are the two huge test rigs that have been built at Sven Wingquist Test Centre, in Schweinfurt, Germany (
see Figure 2). To ensure that the test rigs are used in an optimal way, all test conditions are to be simulated beforehand. Test results and simulated results are being compared to increase the understanding of the bearing’s behavior and to give feedback to the simulation model (
see Figure 3).
 Figure 2. The main shaft test rig at the Sven Wingquist Test Centre in Schweinfurt, Germany. (Figure courtesy of SKF.)
Figure 2. The main shaft test rig at the Sven Wingquist Test Centre in Schweinfurt, Germany. (Figure courtesy of SKF.)
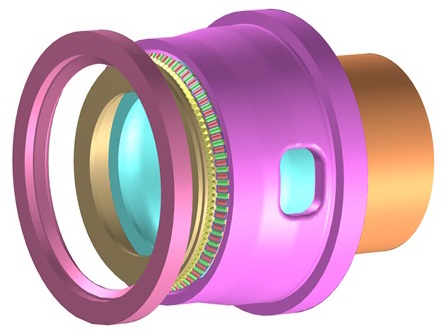 Figure 3. A main shaft bearing (outer ring shifted to show the roller sets) mounted in the test rig, as modeled in BEAST. (Figure courtesy of SKF.)
TLT: What future trends do you see in simulation software?
Stacke:
Figure 3. A main shaft bearing (outer ring shifted to show the roller sets) mounted in the test rig, as modeled in BEAST. (Figure courtesy of SKF.)
TLT: What future trends do you see in simulation software?
Stacke: There is definitely a bright future in simulations. The world is more and more data and calculation driven. I think we will see two seemingly conflicting trends. One is for more complex and physically advanced models, the other for easier usage and availability at the users’ fingertips.
People, both within the bearing industry and our customers, will demand more access to more accurate simulation results with less efforts from their side. And a bit further down the road, people will not be satisfied with knowing how it works; they will want support in their decision making (e.g., through artificial intelligence). But by then I am hopefully enjoying retirement!
References
Fritzson, D., Stacke, L-E. and Anders, J. (2013), “Dynamic simulation – Building knowledge in product development,”
Evolution – Business and Technology Magazine from SKF. Available
here.
Göbel, M. and Zika, T. (2017), “Testing to the limits,”
Evolution – Business and Technology Magazine from SKF. Available
here.