Complexity in ISFA (in-service fluid analysis): Part XXXII
Jack Poley | TLT On Condition Monitoring May 2017
Holistic condition monitoring in the 21st Century: Part IV
FOLLOWING MY LAST COLUMN, I will expand on the four scenarios represented in the graphic I left you with.
Before sensors began to be accepted (and they are proliferating as their cost versus usefulness/return begins to balance out), samples removed from fluid sumps implied no risk. In fact, the whole idea of episodal sampling was to reduce risk of surprise failures by spotting potential problems in development stage in time to take corrective action and mitigate the problem, sometimes even with a root cause elimination to prevent recurrence. With sensors now beginning to take hold, suddenly there is an introduced risk situation via the notion of only sampling without sensor support. Why wouldn’t one want sensors?
The obvious reason for not adopting sensors is lack of perceived cost effectiveness. Sensors are expensive, though generally a one-time expense per application. They also have been seen as oft malfunctioning and, thus, lacking dependability—until recent years—
so far as fluid analysis is concerned. In contrast, VIB sensors have been dependable for decades, owing to being positioned externally on the machine and not having to reside in a hot, often contaminated fluid.
Progress in quality and cost-effectiveness has begun to remove such objections, particularly in situations where uptime is hypercritical—there is critical and then there is hyper—or supercritical uptime need. Once that barrier is deemed overcome for certain operations, the sensors literally
introduce the notion of a new risk condition, that of waiting for another sample result, i.e., expressing the question: Is there enough information from the sensor to make a decision without waiting for another sample to be analyzed?
Naturally it depends on what type of situation (contamination, VIS issue, wear, etc.) the abnormal sensor reading implies, along with the level of severity the data reach, and the time interval the abnormal readings persist. If relatively non-threatening contamination is indicated, that could be something that might be evaluated as relatively benign, whereas, if ferrous wear is sensor detected (and that would be confined to mostly fatigue or large-particle wear, given sensors’ limitations in detecting/measuring small wear particles), such an indication, if severe enough, might be enough to generate at least soft diagnostics, maybe even mechanical inspection given sufficient levels. This all assumes that enough test data from similar components are available for the evaluator (or evaluation software) to assess the severity level with a high degree of confidence.
The question to answer when sensor readings are of concern is whether or not there is time to attempt to get a sample rush analyzed, out of turn, to provide additional support information for a decision. Or is an immediate mechanical inspection deemed more appropriate?
Looking at the four scenarios in Figure 1:
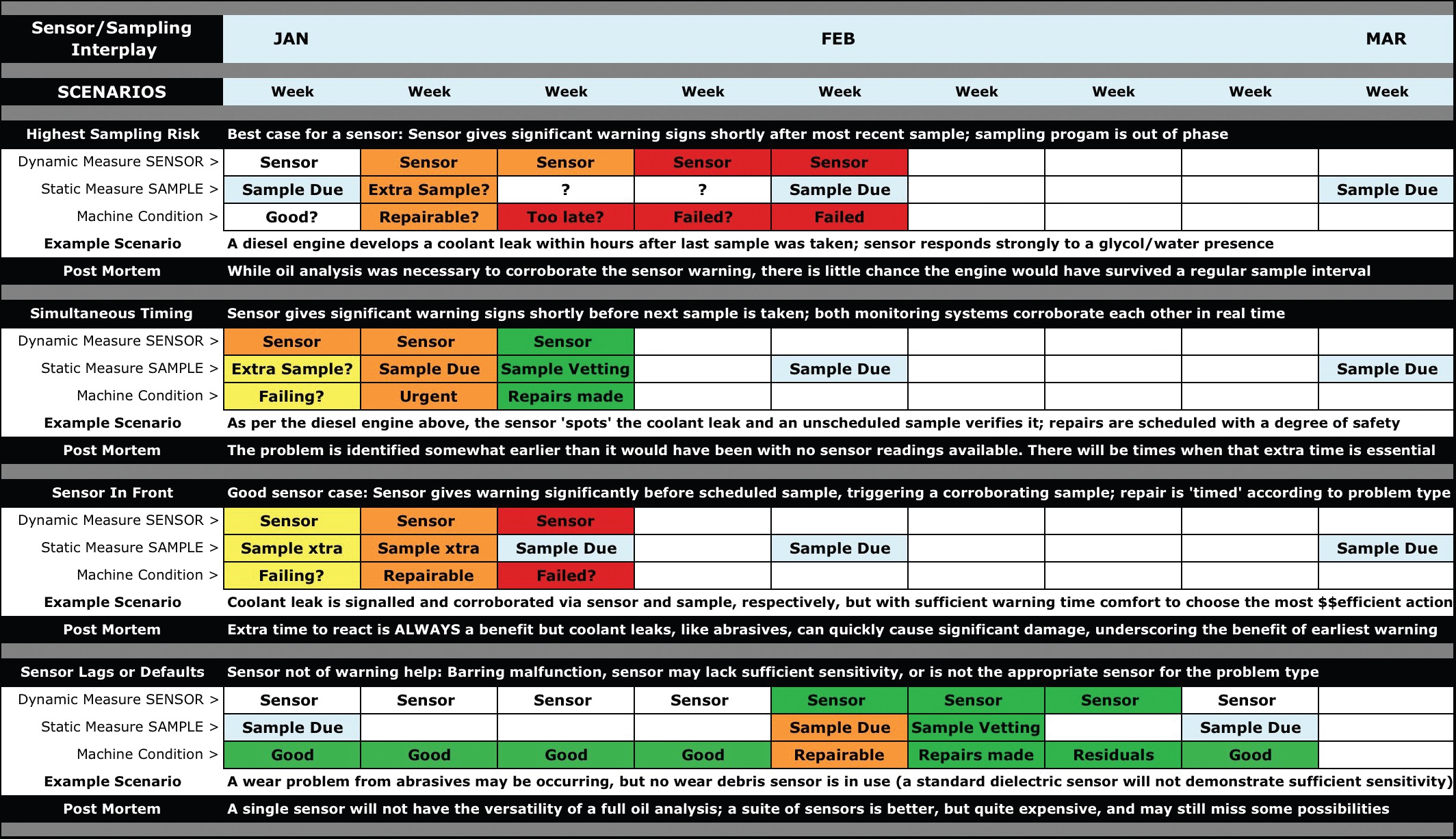 Figure 1.
Highest Sampling Risk—Exposure.
Figure 1.
Highest Sampling Risk—Exposure. This is a situation where the machine is facing its longest interval between episodal sampling and, therefore, 100% dependent on sensor indications. The sensor readings and sample test results are completely out of phase. Longer intervals between abnormal sensor readings and episodal sampling create greater risk.
This is a sensor’s best moment wherein it is able to identify an abnormal situation and allow immediate action (or immediate resampling) to be executed. The example of coolant leakage represents a critical development in a diesel engine, with the distinct possibility of engine seizure in relatively short order. It is one of the worst situations and a time where the sensor may very well pay for itself in one event.
Simultaneous Timing—Corroboration. This condition is met when a sensor provides an abnormal reading shortly before (or after) the current sample has been analyzed. Both sampling methods are in phase and can complement each other to enable the best evaluation possible.
Sensor In Front—Lead Time Opportunity. If abnormal sensor readings are prevalent at some point near the middle of the regular sampling interval, a sample can be taken out of turn and a decision made as to whether or not to take action, following analysis. If the sensor readings remain abnormal while correlation/corroboration is sought, it is particularly likely that a mechanical inspection would be advisable, with soft diagnostics and other pre-inspection maintenance tactics invoked. If the sensor readings abate to a normal level and the fluid test yields no critical results, one might make the reasonable decision to observe for a while longer, with hope that the situation has stabilized. Perhaps a particularly taxing duty cycle caused the temporary spike. If there’s no continuing support via abnormal sensor data it would often be best to refrain from being too aggressive.
Sensor Lags or Defaults. If the sensor doesn’t provide abnormal readings when a problem has been detected via static fluid analysis, there are two primary possibilities:
1.
The sensor lacks sufficient sensitivity, relative to corroborating the problem.
2.
The sensor does not have the ability to detect the type of problem disclosed by laboratory analysis. Clearly having a ferrous debris sensor in place will not detect a problem with water or coolant contamination.
By and large, the notion of belt and suspenders, that of employing sensors along with a qualified in-service fluid analysis program, has much promise as the technology of lube-immersed sensors is increasingly perfected, coupled with sophisticated software that mimics and augments the human process of evaluation in a systematic, effective manner.
 Jack Poley is managing partner of Condition Monitoring International (CMI), Miami, consultants in fluid analysis. You can reach him at jpoley@conditionmonitoringintl.com
Jack Poley is managing partner of Condition Monitoring International (CMI), Miami, consultants in fluid analysis. You can reach him at jpoley@conditionmonitoringintl.com.
For more information about CMI, visit www.conditionmonitoringintl.com.