RoboBees: Learning to perch
Dr. Neil Canter, Contributing Editor | TLT Tech Beat August 2016
Micro aerial vehicles can now improve their endurance and productivity.
KEY CONCEPTS
•
The limited endurance of micro aerial vehicles reduces their ability to be used in many potential applications.
•
A process called electrostatic adhesion enables a micro aerial vehicle called a RoboBee to perch below a surface.
•
Perching enables a RoboBee to reduce power consumption by three orders of magnitude.
THE DEVELOPMENT OF ROBOTICS AND MACHINERY that uses human learning techniques to improve productivity is gaining in use. We in the lubricants industry need to be aware of these technologies as they are increasingly impacting the use of specific lubricants in particular applications.
An example of how better learning leads to improved performance comes from a past TLT article on improving the efficiency of plug-in-hybrid electric vehicles. Researchers evaluated the use of an energy management system that incorporated the concept of reinforcement learning in a plugin-hybrid electrical vehicle traveling along a specific 20-mile commuter route in a well-traveled area in Southern California (
1). Greater efficiency was achieved through a nearly 12% reduction in fuel consumption.
The use of drones is becoming more popular for a variety of industrial applications. One type that is under evaluation is known as a micro aerial vehicle (MAV). A MAV typically has a size that can be as small as 15 cm.
These vehicles may be useful in a number of applications including enabling secure signal transmission in ad hoc communications networks and assisting rescue workers by providing images of a disaster area. However, one concern about MAVs is how to extend their flight time.
Moritz Graule, graduate student at MIT in Cambridge, Mass., says, “Two key parameters restricting the flight time of MAVs are the weight of their on-board power supplies and the lifetime of their mechanical components. Smaller MAVs exhibit less endurance compared to their larger counterparts.”
This last issue is of interest to Graule because he has been working with insect-like MAVs that are smaller in size than bird-sized vehicles. He says, “Insect-like MAVs may potentially be preferred for use in specific situations where it is cheaper to deploy many low-cost MAVs in a specific area. One example is to have them assist in the aftermath of an earthquake where their small size will be invaluable in looking for survivors and saving lives.”
An interesting strategy for improving the endurance of MAVs is to enable them to perch on an object such as a tree, building or powerline in a similar manner to a bird or an insect. By perching, the MAV can conserve sufficient energy to expand its mission time, thereby improving endurance and productivity.
Past attempts to enable MAVs to perch required intricate systems with moving parts or needed a high degree of force to detach from the perch that could disturb vehicle stability. A new approach has now been developed enabling MAVs to perch in a manner that uses less energy than flying and does not generate any destabilization when the MAVs engage or disengage.
ELECTROSTATIC ADHESION
Graule worked with colleagues including Robert J. Wood, Charles River Professor of Engineering and Applied Sciences at the Harvard John A. Paulson School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering at Harvard University in Cambridge, to develop a procedure for enabling MAVs to perch underneath a surface. The researchers used a process called electrostatic adhesion that is similar to rubbing a balloon against a wool sweater and then enabling it to stick to a wall.
Graule says, “We are working with an insect-like MAV that is known as a RoboBee, which is very light because it weighs about 84 mg. This makes the RoboBee very difficult to stabilize and we cannot use a complex mechanism that could add too much weight to the MAV.”
The objective of the researchers is to perch the MAV below a surface so that it can still continue its function while minimizing energy use. Electrostatic adhesion is produced by placing a lightweight (13.4 mg) electrode patch and foam mount on the RoboBee. Graule says, “The foam mount acts as a dampener to minimize the possibility of the RoboBee rebounding off the surface.The electrode patch ensures adhesion to the substrate by inducing areas of net charge on its surface.”
The researchers conducted experiments in a laboratory environment where the substrate is attached to the ceiling. The RoboBee is wired to a power source that enables it to fly toward and perch on several substrates including a leaf (
see Figure 1), glass and unfinished plywood.
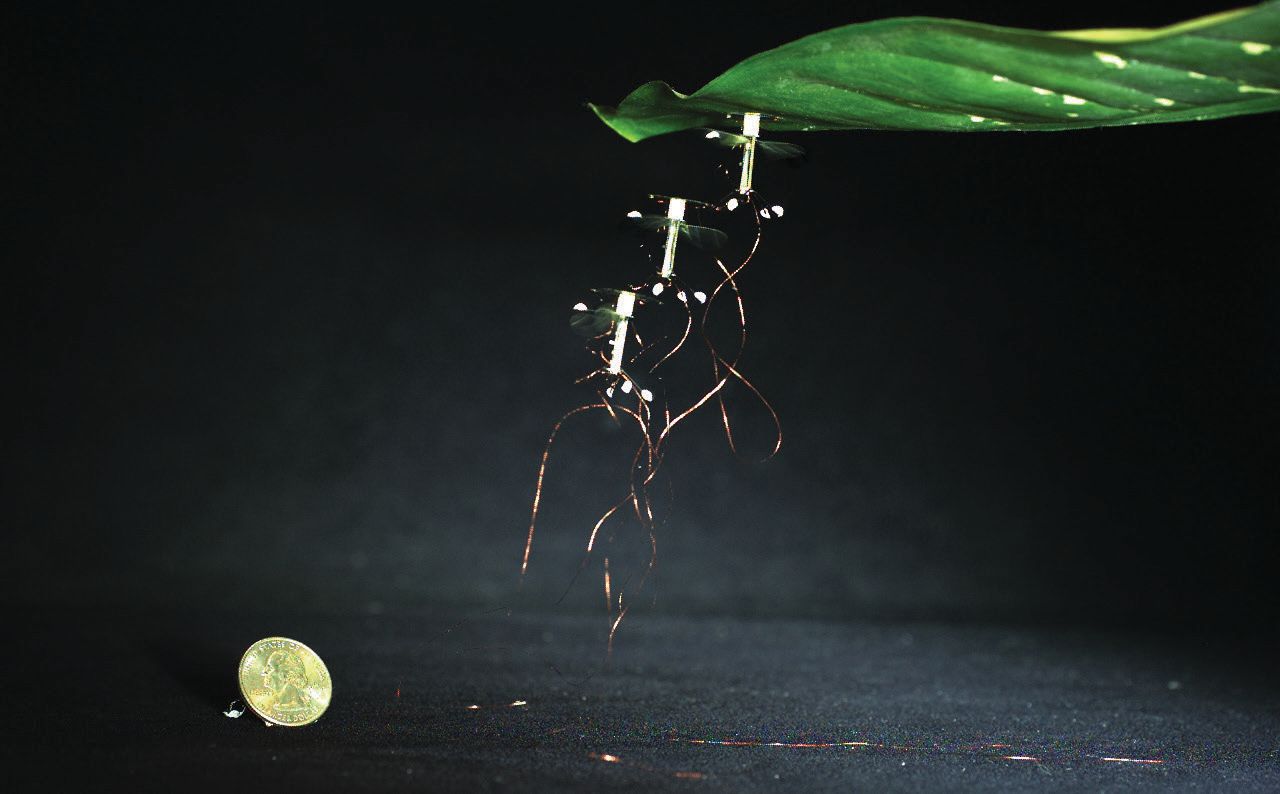 Figure 1. Electrostatic adhesion enables the RoboBee to perch underneath a leaf. (Figure courtesy of Harvard University.)
Figure 1. Electrostatic adhesion enables the RoboBee to perch underneath a leaf. (Figure courtesy of Harvard University.)
Graule says, “We are able to keep the RoboBee perched on any surface for many minutes. During the trials, the RoboBee did not fall off any surface. Detachment took place by turning off the power supply.”
Graule continues, “By perching the RoboBee, we are able to reduce power consumption by three orders of magnitude as compared to just having the RoboBee fly.”
In the future, Wood is looking to have the RoboBee operate untethered to a power supply, which is a step that will bring them closer to actual use. He says, “The two primary remaining challenges are integrating power and computation (i.e., for control) on board.”
Additional information can be found in a recent paper (
2) or by accessing the website of Wood’s lab at
http:// micro.seas.harvard.edu.
REFERENCES
1.
Canter, N. (2016), “Improving the efficiency of plug-in-hybrid electric vehicles,” TLT,
72 (5), pp. 16-17.
2.
Graule, M., Chirarattananon, P., Fuller, S., Jafferis, N., Ma, K., Spenko, M., Kornbluh, R. and Wood, R. (2016), “Perching and takeoff of a robotic insect on overhangs using switchable electrostatic adhesion,”
Science,
352 (6288), pp. 978-982. Available at
http://science. sciencemag.org/content/ 352/6288/978.
Neil Canter heads his own consulting company, Chemical Solutions, in Willow Grove, Pa. Ideas for Tech Beat can be submitted to him at neilcanter@comcast.net.