Numerical modelling of frictional behavior in rough compliant contacts under lubricated conditions
Qian Wang1, Tom Reddyhoff1, Daniele Dini1
1Mechanical Engineering, Imperial College London, London, UK
INTRODUCTION: Complaint contacts are of great importance in bio-system and engineering applications, such as artificial cartilage, contact lenses, tire/road contacts, wiper blade/windscreen system and sealing. Considerable studies have been performed to investigate the tribological behavior on this type of contacts. Experimentally, researchers have already been able to obtain full Stribeck curves in rolling and sliding condition [1] and measure the film thickness with different techniques [2]. In the meantime, numerical simulation also provides valuable tools in understanding and predicting the fluid-solid interaction or the solid-solid interaction between contact bodies.
However, most of the modeling focus on specific areas, such as the influence of roughness on contact mechanics [3], the effect of viscoelasticity on friction and lubrication [4], the transition from boundary lubrication to elasto-hydrodynamic lubrication (EHL) [5], and finite deformation in materials with low elastic modulus [6]. This is because rough compliant contacts are very complex systems and to simulate the behavior of interacting bodies in full range of lubrication regimes not only requires full characterization of solids, e.g. material and roughness etc., but also needs to handle the nonlinearity caused by large deformation or irregular geometry like wiper blade or O-ring seals.
So far, there have been very limited literatures on considering all the aspects above. Here, we propose a numerical approach to capture the transition from boundary lubrication to EHL including the effect of multi-scale roughness nonlinearity resulting from materials and geometry. The roughness is incorporated either using Persson’s theory [7] or a boundary element method. A deformation solver based on a finite element model is developed and utilized to determine the deflection of finite bodies with any configuration.
METHODS: The full Fluid-Solid-Interaction solver includes three solvers: the fluid solver which gives the information on fluid flow, the solid solver which treats the asperity-asperity contact, and the deformation solver which handles the deflection of the solid body.
To explain further, the fluid pressure can be calculated from Reynolds equation by a traditional finite difference method and an over-successive relaxing technique. The solid solver, on the other hand, is to determine the pressure originated from asperity-asperity interaction through a pre-defined function which describes the relation between the applying force and the average gap. If the rough surface is self-affine fractal as most surfaces in reality, Persson’s theory of rough contact mechanics can be applied once the roughness is characterized, i.e. the cut-off roughness wave vector, the Hurst exponent, and the root-mean-square value are obtained. In addition, in cases of non-fractal surfaces, we adopt a conjugate-gradient based iterative method to derive the pressure-separation relation for any measured rough surfaces deterministically.
The deformation of soft materials usually involves viscoelastic or hyper-elastic behavior and is not linear. Thus, in the deformation solver, a reduced stiffness matrix method based on finite element models is introduced. A reduced stiffness matrix of all the nodes in contacts is extracted from the full element model via the substructure feature in FE software package ABAQUS and represent the reaction of solids for a certain state, in which way linearize the nonlinearity. The reduced stiffness matrix/matrices can be used repeatedly as long as the evolution of deforming is slow. Another advantage of this approach is that the stiffness matrix is not limited to simple profiles, e.g. ball or cylinder, and allows for any dimension and configuration which traditional influence matrix lacks.
 As the sliding speed increases, the entrainment of the lubricant begins to separate the rough surface and plays a more important role in supporting the load. The solid pressure, on the contrary, drops due to the reduction of asperity contacts. For this reason, two algorithms are employed to accommodate the nonlinear coupling of fluid pressure and the separation in Reynolds equation to avoid convergence issue.
As the sliding speed increases, the entrainment of the lubricant begins to separate the rough surface and plays a more important role in supporting the load. The solid pressure, on the contrary, drops due to the reduction of asperity contacts. For this reason, two algorithms are employed to accommodate the nonlinear coupling of fluid pressure and the separation in Reynolds equation to avoid convergence issue.
RESULTS: The data in Figure 1 shows the measured and predicted friction coefficients on a line contact between a soft rough solid and a smooth rigid plane over a wide range of velocities. The rough surface is measured using a stylus instrument and exhibits non-fractal features. Thus, the contact mechanics was determined deterministically and introduced in the solid solver. The material considered here is hyper-elastic and viscoelastic. The scattered dots are obtained from experiments and the line is from numerical calculation. Clearly, the numerical results agrees with experimental data very well demonstrating great potential in describing the frictional behavior in lubricated conditions.
The subplots illustrate how the fluid pressure (solid lines) and solid pressure (dashed lines) and film thickness vary in different regimes. It is noticeable that the solid pressure dominates in the boundary lubrication regime and fluid pressure prevails in the EHL as anticipated. The growth of separation is also prominent, from ~10 nm to ~200 nm.
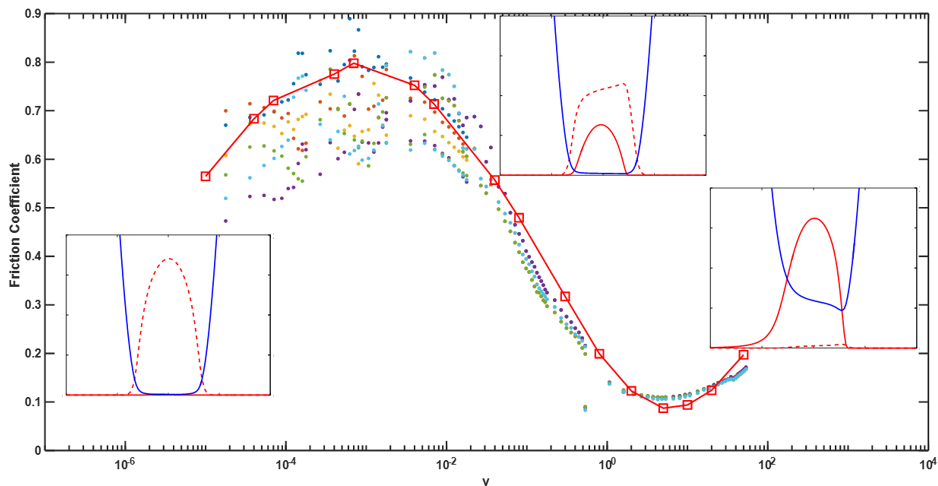
Figure 1 - Stribeck curve obtained experimentally and numerically; pressure distribution and film thickness are also shown for different regimes (dashed lines show solid pressure and solid lines liquid pressure)
DISCUSSION: Just like the load is sheared by the lubricant and asperity component, the friction is contributed by the fluid-solid shearing and the asperity-asperity shearing. When the latter is concerned, we consider the frictional stress is directly related to the contact area. More specifically, it is the product of real contact ratio and a shear stress limit which is assumed to be independent of local pressure and velocity. However, this may not always holds true and further correction on how the friction should be corrected for different surface energy, loads and speeds.
REFERENCES: 1. De Vicente, Tribology Letters (2005). 2. Myant, Tribology Transactions (2010), 3. Putignano, Tribology International.(2013), 4. Persson, The Journal of Chemical Physics. (2004), 5. Persson, Journal of Physics: Condensed Matter. (2009), 6. Stupkiewicz, Tribology International. (2016) 7. Perrson, Surface Science Reportst. (2006)